3. Federpendel#
Eine der einfachsten Pendelbewegungen ist das Federpendel. Das Federpendel führt eine eindimensionale Pendelbewegung durch, die durch eine harmonische Schwingung beschrieben werden kann.

Fig. 3.1 Federpendel, Quelle: Oleg Alexandrov - self-made with en:Matlab., Gemeinfrei#
Im folgenden wird zunächst am Beispiel des Federpendels die grundlegende harmonische Schwingungsgleichung betrachtet und danach darauf aufbauend die gedämpfte und die erzwungene Schwingung.
3.1. Bewegungsgleichung des Federpendels#
Das Federpendel ist eine Masse, die an einer Feder aufgehangen ist. Vereinfacht kann dieses Konstrukt als Punktmasse an einer masselosen Feder betrachtet werden, so das die Pendelbewegung alleine durch die Bewegung des Schwerpunktes beschrieben werden kann. Die Voraussetzung für eine mechanische Schwingung erfüllt das Federpendel in folgender Weise:
Es muss mind. ein schwingungsfähiger Körper vorhanden sein. \(\longrightarrow\) Massepunkt
Der oder die schwingungsfähigen Körper müssen zu Beginn der Schwingung aus ihrer Ruhelage ausgelenkt sein, oder sie müssen eine von Null verschiedene Anfangsgeschwindigkeit haben \(\longrightarrow\) Anfangsbedingung \(x(t = 0 ) = x_0\)
Es müssen rücktreibende Kräfte vorhanden sein, die bewirken, dass sich der oder die Körper nach der Auslenkung wieder in Richtung Ruhelage bewegen \(\longrightarrow\) Hook’sches Gesetz
Das Hook’sche Gesetz beschreibt, mit welcher Kraft eine Feder ihrer Auslenkung entgegenwirkt. Für diese Kraft gilt
wobei k die sogenannte Federkonstante ist. Je größer die Federkonstante, desto stärker die rückstellende Kraft. Je größer die Auslenkung ist, desto größer ist die rückstellende Kraft. Das Minuszeichen stellt sicher, dass die Kraft ihrer Auslenkung entgegenwirkt.

Fig. 3.2 Federpendel ohne Gravitation#
Abbildung Abbildung 3.2 zeigt die Auslenkung eines Federpendels zu 5 unterschiedlichen Zeitpunkten. Diese werden im folgenden nun einzeln betrachtet.
Die Feder wird auseinandergezogen, die Auslenkung \(x\) ist somit positiv. Die Rückstellkraft wirkt der Auslenkung entgegen und wirkt somit in negative x-Richtung \(F_R = -k\cdot x\)
Die Auslenkung ist \(x=0\), die Masse hat eine Geschwindigkeit in \(-x \text{-Richtung}\). Es wirkt keine Rückstellkraft in diesem Punkt
Die Masse hat eine negative Auslenkung. Die Feder wird zusammengedrückt und die Rückstellkraft wirkt in positive x-Richtung \(F_R = - k\cdot x\)
Die Auslenkung ist \(x=0\), die Masse hat eine Geschwindigkeit in \(x \text{-Richtung}\). Es wirkt keine Rückstellkraft in diesem Punkt
Die Feder wird auseinandergezogen, die Auslenkung \(x\) ist somit positiv. Die Rückstellkraft wirkt der Auslenkung entgegen und wirkt somit in negative x-Richtung \(F_R = -k\cdot x\)
Die Bewegung ist in Punkt 5 demnach wieder am gleichen Punkt wie zu Beginn angekommen und startet erneut.
Um die Bewegung mathematisch zu beschreiben, kann eine Kräftebilanz aufgestellt werden.
Allgemein gilt
In diesem Fall ist
da es sich um eine eindimensionale Bewegung handelt. Auf die Masse wirkt nur die Rückstellkraft der Feder, damit ist
Damit gilt
oder auch
Dies ist eine Differentialgleichung. Ihre Lösung liefert die Bewegungsgleichung der Masse. Es wird also eine Funktion gesucht, deren zweifache Ableitung sich nur durch eine Konstante \(\frac{k}{m}\) von der unsprünglichen Funktion unterscheidet. Daher ist eine e-Funktion ein guter Ansatz für eine derartige Differenzialgleichung.
Damit ist
mit \(\omega_0 = \sqrt{\frac{k}{m}}\).
Es gibt also zwei mögliche Lösungen für diese Differentialgleichung. Die Lösung ist die Summe aller möglichen Lösungen und somit ist
Die Konstanten \(c_1\) und \(c_2\) können aus den Anfangsbedingungen bestimmt werden. Angenommen, die Anordnung ist zum Zeitpunkt t = 0 so, wie zum Zeitpunkt 1 in Abbildung Abbildung 3.2, dann gilt
Damit ist
und
Die e-Funktion lässt sich nach der Eulersche Formel auch schreiben als
Damit ist
Mit \(cos ( \frac{\pi}{2}) = 0\) und \(sin (\frac{\pi}{2}) = 1\) ist dann
Dies in und Gleichung (3.1) eingesetzt ergibt
Damit ist die Lösung der Differentialgleichung mit den oben beschriebenen Anfangsbedingungen
Allgemein für beliebige Anfangsbedingungen gilt
Da Sinus und Cosinus sich nur durch eine Phasenverschiebung von \(180^\circ\) unterscheiden, kann auch
geschrieben werden mit \(\phi = \tilde{\phi} + 90^\circ\).
Das Video Abbildung 3.3 zeigt die Bewegung eines Federpendel (oder auch harmonischen Oszillators) mit einer Amplitude von \(\hat{x}=1\) und einer Frequenz von \(\omega = 1\) (Klick auf das Bild startet das Video).
Fig. 3.3 Ortskurve (Bewegungsgleichung) eines Federpendels, bzw. harmonischer Oszillators.#
3.2. Geschwindigkeit und Beschleunigung des harmonischen Oszillators.#
Die Geschwindigkeit und die Beschleunigung des harmonischen Oszillators lassen sich aus den aus der Kinematik bekannten Zusammenhängen herleiten. Für die Geschwindigkeit gilt:
Für die Beschleunigung gilt
Beim Nulldurchgang ist also die Geschwindigkeit des Massenpunktes maximal, im Nullpunkt ist die Beschleunigung jedoch =0, hier ist der Massenpunkt kräftefrei. An den Umkehrpunkten ist die Geschwindigkeit = 0, die Beschleunigung ist jedoch maximal und in Richtung des Nulldurchgangs der Schwingung gerichtet. Das Video Abbildung 3.4 zeigt Ortskurve, Geschwindigkeit und Beschleunigung eines Federpendel mit einer Amplitude von \(\hat{x}=1\) und einer Frequenz von \(\omega = 1\) (Klick auf das Bild startet das Video).
Fig. 3.4 Ortskurve, Geschwindigkeit und Beschleunigung eines Federpendels, bzw. harmonischer Oszillators.#
3.3. Harmonischer Oszillator mit Gravitation#
Bislang wurde ein Federpendel ohne den Einfluss der Gravitation betrachtet. In der Realität wirkt diese jedoch auf der Erde und muss somit in die Betrachtung mit aufgenommen werden.
Die Gravitationskraft wirkt zusätzlich zu der durch das Hook’sche Gesetz beschriebenen Federkraft. In der Nähe der Erdoberfläche kann diese Gravitationskraft also konstant mit einer konstanten Erdbeschleunigung von \(g = 9.81 \, \frac{m}{s^2}\) angenommen werden. Die Kräftebilanz muss in diesem Fall erweitert werden auf
Damit wird die Kräftebilanz zu:
und die zu lösende Differentialgleichung wird zu
\(\ddot{x} + \frac{k}{m} \cdot x + g = 0\)$
Da der Term \(g\) konstant ist, kann die Gleichung vereinfacht werden, indem eine neue Variable \(\tilde{x}\) definiert wird mit
mit dieser Variablen gilt
und
Damit wird die Differentialgleichung zu
Diese Differentialgleichung hat exakt die gleiche Struktur wie im Fall ohne Gravitation und somit ebenfalls die Lösung
Die (konstante) Gravitation führt daher lediglich zu einer gesamten Verschiebung der Schwingung um \(- \frac{m}{k}g\).
Fig. 3.5 Vergleich der Ortskurve eines Federpendels, bzw. harmonischer Oszillators ohne und mit Einfluss der (konstanten) Gravitation.#
3.4. Energie des harmonischen Oszillators#
Das reibungsfreie Federpendel (harmonischer Oszillator) führt eine Pendelbewegung aus, bei der kinetische Energie in Spannenergie umgewandelt wird und umgekehrt. In diesem System sind also die kintische und potenzielle Energie des Systems zeitabhängig. Ihre Summe, die mechanische Gesamtenergie $\(E = E_{kin}(t) + E_{spann}(t)\)$ ist jedoch konstant.
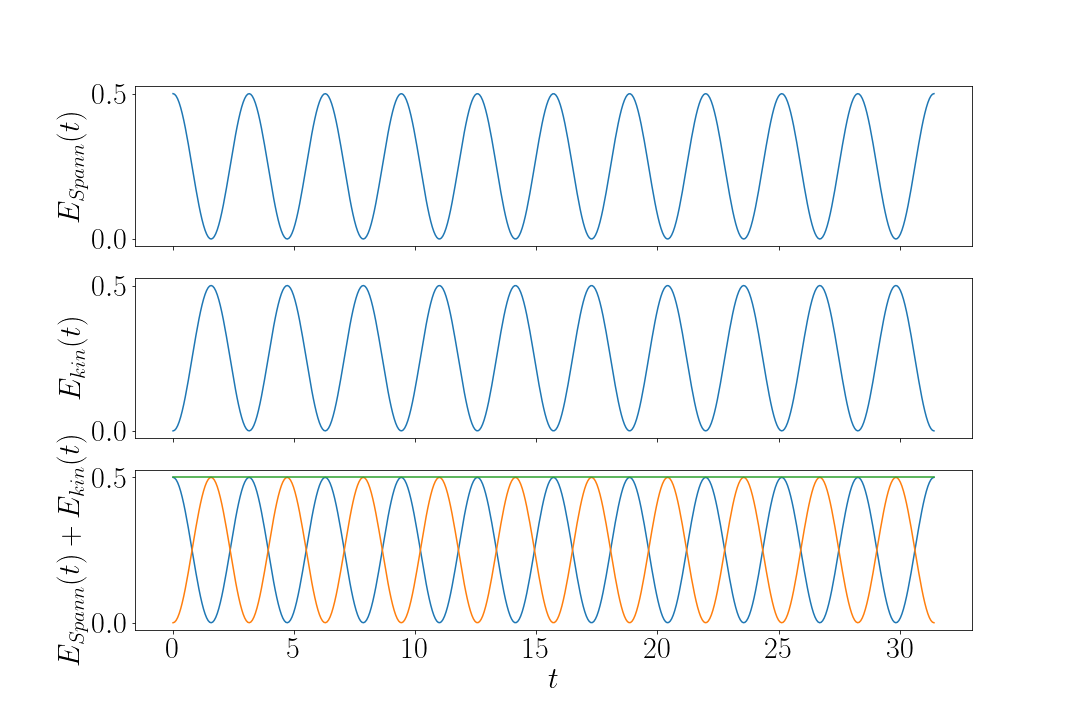
Fig. 3.6 Mechanische Energie des harmonischen Oszillators#
Für die kinetische Energie des harmonischen Oszillators gilt:
Für die Spannenergie des harmonischen Oszillators gilt:
Für die gesamte mechanische Energie des harmonischen Oszillators gilt dann
Da für \(\omega_0\) der Zusammenhang \(\omega_0 = \sqrt{\frac{k}{m}}\) gilt, ist \(k = \omega_0^2 \cdot m\). Damit lässt sich die Gesamtenergie des harmonischen Oszillators zusammenfassen zu
mit \(sin^2 + cos^2 = 1\) wird dies zu