6. Mathematisches Pendel#
Das mathematische Pendel ist eine einfache zweidimensionale Pendelbewegung, die einfach durch eine Masse an einem Faden realisiert werden kann.

Fig. 6.1 Schematische Darstellung eines mathematischen Pendels.#
Allgemein gilt für ein mathematisches Pendel
Ein mathematisches Pendel ist ein idealisiertes Pendel
Es ist ein Pendel, bei dem die Pendelmasse punktförmig ist und der Faden keine Masse hat
Als Amplitude ist hierbei die maximale Auslenkung des Pendels zu verstehen und als Schwingungsdauer wird die Zeit zwischen zwei Durchgängen eines Umkehrpunktes bezeichnet.
Da die Pendellänge konstant ist, bewegt sich die Masse auf einer (Teil-) Kreisbahn. Wie bei der Kreisbewegung kann auch hier das Problem von einem zweidimensionalen auf ein eindimensionales Problem reduziert werden. Dazu werden Polarkoordinaten verwendet und es gilt
da \(r = l = \text{konst}.\) ist
und \(s = l \cdot \phi\)

Fig. 6.2 Polarkoordinaten zur Beschreibung eines mathematischen Pendels.#
Auf das (reibungsfreie) Pendel wirkt zum einen die Gewichtskraft \(\vec{F}_G = m \cdot \vec{g}\), die in -\(y\) wirkt. Der Faden hält die Masse auf der Kreisbahn, die entsprechende Seilkraft wirkt demnach in Richtung des Kreismittelpunktes (siehe Abbildung 6.3).
Für die Betrachtung der Bewegungsgleichung sind nur die Kräfte entlang von \(s=\phi\cdot l\) relevant. Damit gilt:
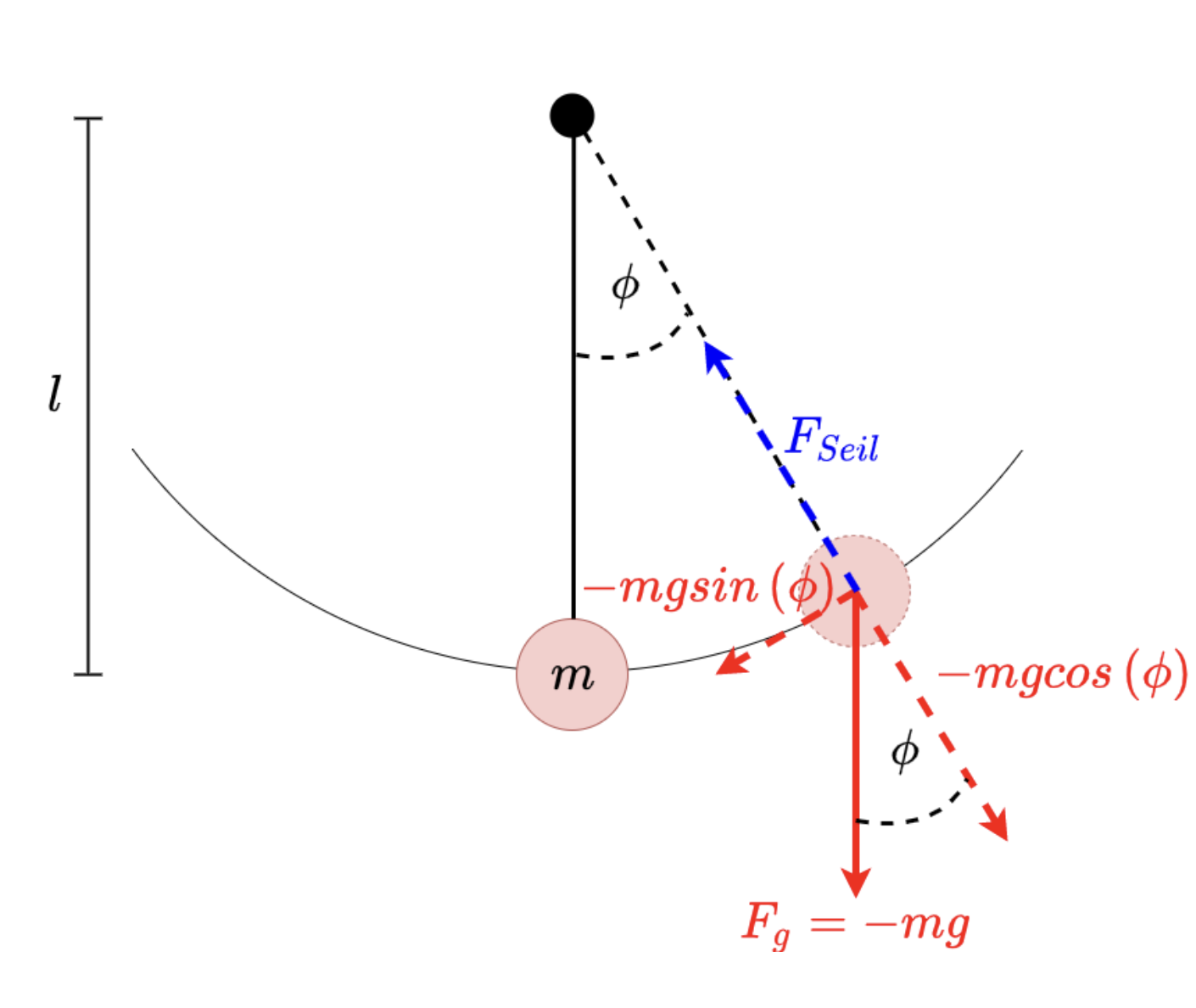
Fig. 6.3 Wirkende Kräfte beim mathematischen Pendels.#
Diese Differentialgleichung ist analytisch nur lösbar für kleine Winkel. Dann gilt näherungsweise \(sin \left( \phi \right) \approx \phi\) und die Differentialgleichung wird zu
Als Lösungsansatz wird wieder ein e-Funktion verwendet
\(\phi(t) = c_1\cdot e^{i\cdot c_2 \cdot t} \)
\(\Rightarrow \frac{d\phi(t)}{dt} = c_1\cdot i \cdot c_2\cdot e^{i\cdot c_2 \cdot t}\)
\(\Rightarrow \frac{d^2\phi(t)}{dt^2} = - c_1 \cdot c_2^2\cdot e^{i\cdot c_2 \cdot t} = - \frac{g}{l} \phi = - \frac{g}{l} c_1\cdot e^{i\cdot c_2 \cdot t}\)
Damit kann \(c_2\) einfach bestimmt werden
Einsetzen der Lösungen mit \(c_2 = \pm \sqrt{\frac{g}{l}}\)
mit \(\omega = \sqrt{\frac{g}{l}}\)
\(2c_1 =: \hat{\phi}\) erhält man aus der Anfangsbedingung \(\phi (t = 0) = \hat{\phi}\)
Allgemeine Bewegungsgleichung:
Mit
\(\hat{\phi}\): maximale Winkelauslenkung des Pendels
\(\omega\): Kreisfrequenz der Schwingung
\(\delta\): Phasenverschiebung
Achtung: \(\omega\) ist hier die sogenannte Kreisfrequenz — nicht die Winkelgeschwindigkeit — Die Winkelgeschwindigkeit \(\dot\phi(t)\) ist zeitabhängig!!!
Es gilt der bekannte Zusammenhang: \(\omega = 2\pi f= \frac{2\pi}{T}\)
Aus der Bewegungsgleichung wissen wir, dass gilt: \(\omega = \sqrt{\frac{g}{l}}\)
Damit ist \(\omega = \frac{2\pi}{T} = \sqrt{\frac{g}{l}}\Leftrightarrow T = 2 \pi \sqrt{\frac{l}{g}}\)
Die Schwingungsdauer hängt also nur ab von
Der Pendellänge \(l\)
Der Erdbeschleunigung \(g\)
\(\Rightarrow\) Durch Messung von \(l\) und \(T\) kann \(g\) bestimmt werden!